Remote Controlled Car Using Raspberry Pi and Webcam
Setup
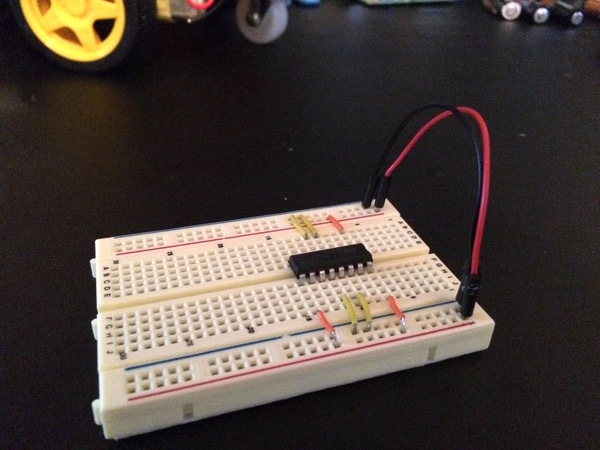
First thing I tackled was setting up the L293D H-Bridge on the Bread Board.
I found myself referencing the following Diagram a couple times.
Step one is connecting your chip down the center of your board:
From here I connected the 3 power pins to my board’s power rail using a few Jumpers :
A few more Jumpers connect each side of the chip to ground:
Finally I use a couple Wires to connect both sides of my power and ground rails:
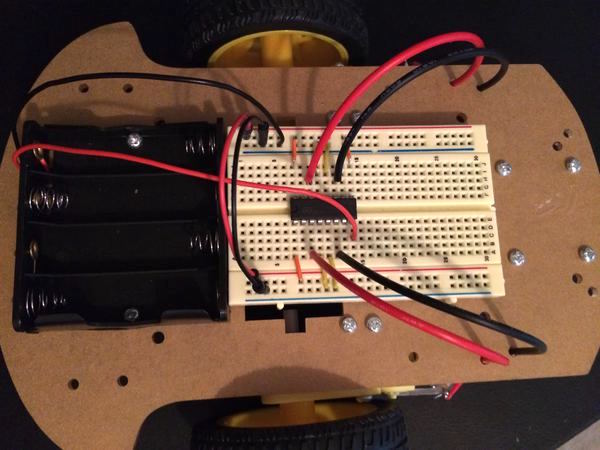
Using a little bit of double sided tape I stick my board onto the Car Chassis :
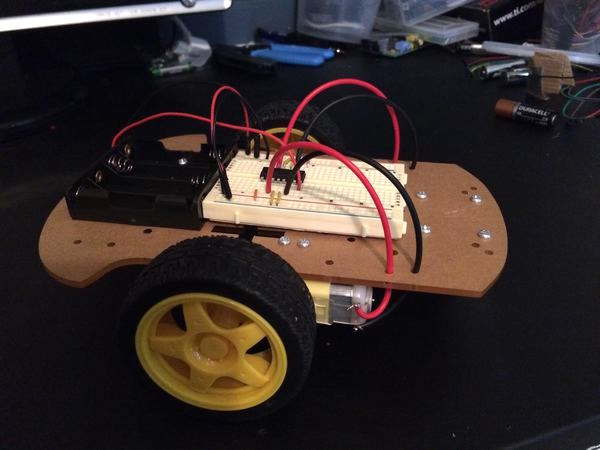
I also wired up each DC motor, and the battery pack to the board:
Next I wired up my Raspberry Pi ’s GPIO pins , connecting them to the L293D .
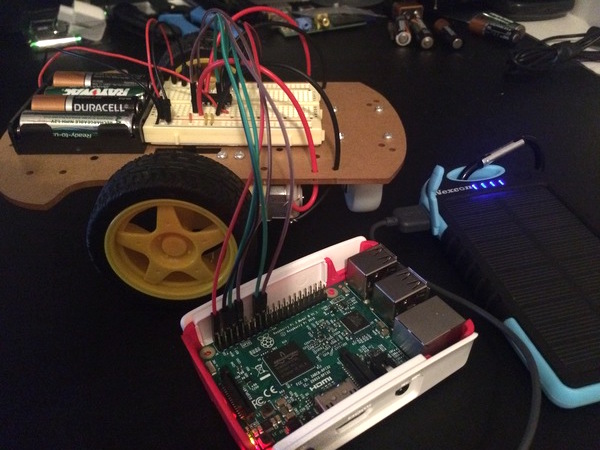
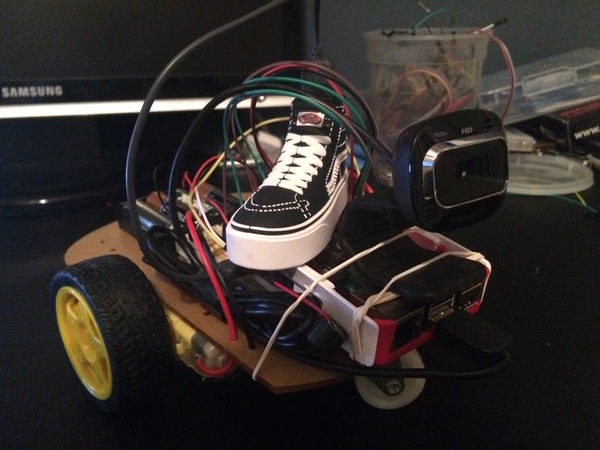
Once I’ve verified the GPIOs were connected properly, I used a couple rubber bands to strap the Pi, Portable USB Charger (I used a Vans Shoe Charger ) and Web Cam to the cassis:
Code
On the Raspberry Pi I’m using Raspbian as the operating system, and installed a couple pieces of software:
My nginx configuration is really basic and looks like this:
server {
listen 80 default_server;
listen [::]:80 default_server;
root /var/www/html;
location /stream {
proxy_pass http://localhost:8080/?action=stream;
proxy_set_header Content-Type "image/jpeg";
}
location / {
proxy_pass http://localhost:8000;
}
}
The Flask application is a bit janky, but gets the job done:
app.py
import RPi.GPIO as GPIO
from flask import Flask, render_template
from flask import request
GPIO.setmode(GPIO.BCM)
GPIO.setup(14, GPIO.OUT)
GPIO.setup(15, GPIO.OUT)
GPIO.setup(23, GPIO.OUT)
GPIO.setup(24, GPIO.OUT)
app = Flask(__name__)
@app.route("/")
def index():
return render_template('index.html')
@app.route("/left")
def left():
method = request.args.get('method')
if method == 'stop':
sig = GPIO.LOW
else:
sig = GPIO.HIGH
GPIO.output(23, sig)
return "OK"
@app.route("/forward")
def forward():
method = request.args.get('method')
if method == 'stop':
sig = GPIO.LOW
else:
sig = GPIO.HIGH
GPIO.output(15, sig)
GPIO.output(24, sig)
return "OK"
@app.route("/backward")
def backward():
method = request.args.get('method')
if method == 'stop':
sig = GPIO.LOW
else:
sig = GPIO.HIGH
GPIO.output(14, sig)
GPIO.output(23, sig)
return "OK"
@app.route("/right")
def right():
method = request.args.get('method')
if method == 'stop':
sig = GPIO.LOW
else:
sig = GPIO.HIGH
GPIO.output(14, sig)
return "OK"
if __name__ == "__main__":
app.run(host='0.0.0.0', port=8000, debug=True)
While the template contains a bit of Javascript to handle button presses:
templates/index.html
[html]
<html>
<head>
<link rel="stylesheet" href="https://maxcdn.bootstrapcdn.com/bootstrap/3.3.7/css/bootstrap.min.css" integrity="sha384-BVYiiSIFeK1dGmJRAkycuHAHRg32OmUcww7on3RYdg4Va+PmSTsz/K68vbdEjh4u" crossorigin="anonymous">
<style>
img {
margin-top: 25px;
margin-bottom: 25px;
}
</style>
<script
src="https://code.jquery.com/jquery-3.2.1.min.js"
integrity="sha256-hwg4gsxgFZhOsEEamdOYGBf13FyQuiTwlAQgxVSNgt4="
crossorigin="anonymous"></script>
<script src="https://maxcdn.bootstrapcdn.com/bootstrap/3.3.7/js/bootstrap.min.js" integrity="sha384-Tc5IQib027qvyjSMfHjOMaLkfuWVxZxUPnCJA7l2mCWNIpG9mGCD8wGNIcPD7Txa" crossorigin="anonymous"></script>
<script>
// define our fired states to false
var forward_fired = false;
var backward_fired = false;
var left_fired = false;
var right_fired = false;
// keydown event will start motor
document.onkeydown = function() {
if(event.keyCode == 87) {
if(!forward_fired && !backward_fired) {
forward_fired = true;
button = document.getElementById('up');
button.className = 'btn btn-success btn-lg disabled';
console.log('start forward');
$.get("/forward")
}
}
if(event.keyCode == 83) {
if(!backward_fired && !forward_fired) {
backward_fired = true;
button = document.getElementById('down');
button.className = 'btn btn-success btn-lg disabled';
console.log('start backward');
$.get("/backward")
}
}
if(event.keyCode == 65) {
if(!left_fired && !right_fired && !backward_fired) {
left_fired = true;
button = document.getElementById('left');
button.className = 'btn btn-success btn-lg disabled';
console.log('start left');
$.get("/left")
}
}
if(event.keyCode == 68) {
if(!right_fired && !left_fired && !backward_fired) {
right_fired = true;
button = document.getElementById('right');
button.className = 'btn btn-success btn-lg disabled';
console.log('start right');
$.get("/right")
}
}
};
// keyup event will stop motor
document.onkeyup = function() {
if(event.keyCode == 32) {
console.log('beep');
$.get("/beep")
}
if(event.keyCode == 87) {
if(forward_fired) {
forward_fired = false;
button = document.getElementById('up');
button.className = 'btn btn-default btn-lg disabled';
console.log('stop forward');
$.get("/forward?method=stop")
}
}
if(event.keyCode == 83) {
if(backward_fired) {
backward_fired = false;
button = document.getElementById('down');
button.className = 'btn btn-default btn-lg disabled';
console.log('stop backward');
$.get("/backward?method=stop")
}
}
if(event.keyCode == 65) {
if(left_fired) {
left_fired = false;
button = document.getElementById('left');
button.className = 'btn btn-default btn-lg disabled';
console.log('stop left');
$.get("/left?method=stop")
}
}
if(event.keyCode == 68) {
if(right_fired) {
right_fired = false;
button = document.getElementById('right');
button.className = 'btn btn-default btn-lg disabled';
console.log('stop right');
$.get("/right?method=stop")
}
}
};
</script>
</head>
</body>
<div class="container">
<div class="row">
<center>
<img src="/stream" class="img-thumbnail">
</center>
</div>
</div>
<!-- control buttons -->
<div class="container">
<div class="row">
<center>
<button id="left" type="button" class="btn btn-default btn-lg disabled">
<span class="glyphicon glyphicon-arrow-left" aria-hidden="true"></span>
</button>
<button id="up" type="button" class="btn btn-default btn-lg disabled">
<span class="glyphicon glyphicon-arrow-up" aria-hidden="true"></span>
</button>
<button id="down" type="button" class="btn btn-default btn-lg disabled">
<span class="glyphicon glyphicon-arrow-down" aria-hidden="true"></span>
</button>
<button id="right" type="button" class="btn btn-default btn-lg disabled">
<span class="glyphicon glyphicon-arrow-right" aria-hidden="true"></span>
</button>
</center>
</div>
</div>
</body>
</html>
I haven’t yet configured the Flask and mjpg-streamer processes to startup automatically, so I connect via a shell and start each in a screen session.
Once that is done connect to the running nginx server using your browser, you should be presented with a user interface similar to this:
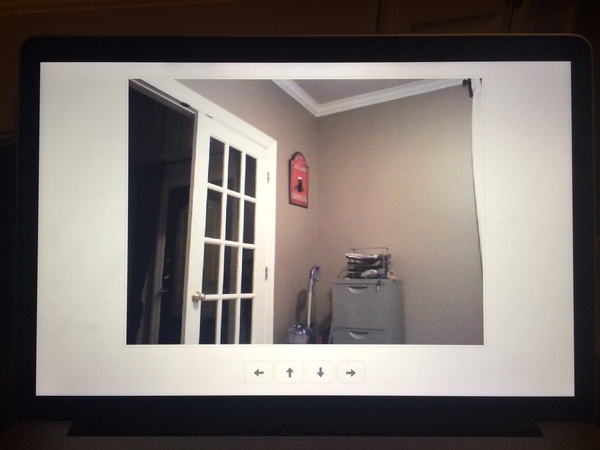 Use your keyboard to control the car, just like a video game the key
W
moves forward,
S
backwards,
A
left, and
D
is right.
Use your keyboard to control the car, just like a video game the key
W
moves forward,
S
backwards,
A
left, and
D
is right.
Component List
Here is a list of each of the components (or comparable) I used during the setup:
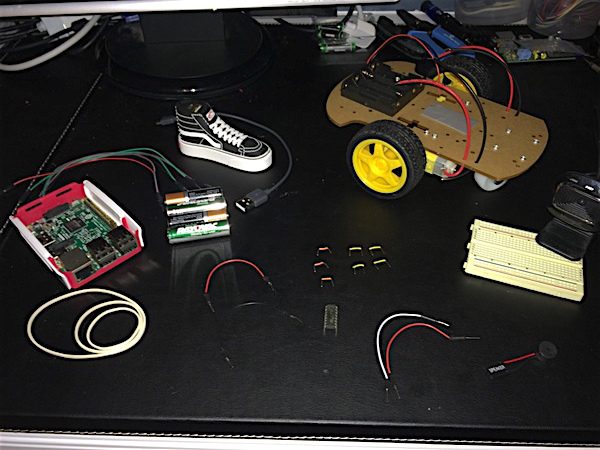
Raspberry Pi 3 Model B Motherboard




Adafruit Dual H-Bridge Motor Driver for DC or Steppers - 600mA - L293D [ADA807]





{kind=link}
{kind=link}